Autonomiczny pojazd do automatycznego wysiewu międzyplonu w uprawie kukurydzy.
Kacper Zymek, Robert Florek (opiekun)
Zespół Szkół Centrum Kształcenia Rolniczego w Żarnowcu
Krakowska 25, 42-439 Żarnowice
e-mail: rflorek@interia.pl_
SŁOWA KLUCZOWE: Autonomia, robotyka, automatyka, programowanie, sztuczna inteligencja,
ABSTRAKT
Pomysł z autonomicznym siewem międzyplonu powstał u mnie jak zacząłem się zastanawiać w jaki sposób zasiać międzyplon w czasie kiedy kukurydza ma już odpowiednią wysokość. Zbyt wczesny wysiew powoduje że kukurydza rośnie wolniej i nie osiąga zamierzonych wysokości z powodu że ta roślina nie lubi konkurencji późniejszy siew jest niemożliwy z powodu wysokości roślin i siew ciągnikiem doprowadził by do dużych zniszczeń plantacji. Dlatego autonomiczny mały pojazd który mieści się międzyrzędami rośliny jest do tego celu idealny.
Pracę zacząłem od przestudiowania różnych stron internetowych na których zapoznałem się z dostępnymi materiałami (silniki z przekładnią, komputery pokładowe, sterowniki silników, łączność bezprzewodowa, czujniki, oprogramowanie) za pomocą których będę mógł zbudować pojazd.
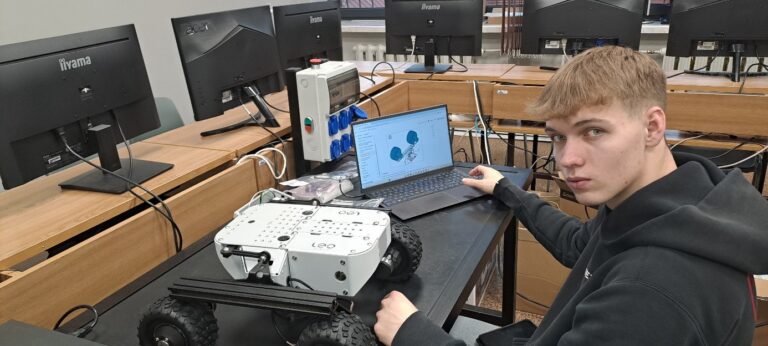
Zacząłem gromadzić potrzebne mi materiały i rozpoczęła się budowa łazika
Celem projektu było zbudowanie autonomicznego robota rolniczego, którego zadaniem jest precyzyjny siew międzyplonów w międzyrzędziach kukurydzy. Robot został zaprogramowany w systemie ROS (Robot Operating System). Jego orientacja i nawigacja w terenie opierają się wyłącznie na lokalnych sensorach i systemie wizyjnym.
Napotkane problemy
a) Trudności w lokalizacji i utrzymaniu toru jazdy bez GPS
Brak dostępu do GPS wymusił zastosowanie alternatywnych metod lokalizacji, takich jak analiza obrazu z kamer i czujników odległości (LiDAR, kamera). W praktyce okazało się to dużym wyzwaniem – robot miał trudności z utrzymaniem równego toru jazdy, szczególnie w przypadku nierównych lub zakrzywionych rzędów kukurydzy.
Problemy z integracją sensorów w ROS
Wprowadzenie wielu czujników (kamera, czujniki odległości) do jednego systemu sterowania opartego na ROS wymagało dokładnej synchronizacji danych.
Dalsze zawiłości i konieczne usprawnienia
- Rozwój systemu wizyjnego: Należy wprowadzić bardziej zaawansowane algorytmy rozpoznawania rzędów, najlepiej z wykorzystaniem uczenia maszynowego, które pozwolą na lepsze dostosowanie się do zmiennych warunków oświetleniowych i różnych stadiów wzrostu kukurydzy.
- Lepsza integracja sensorów w ROS: Potrzebna jest optymalizacja struktury węzłów i wprowadzenie filtrów (np. filtru Kalmana), które umożliwią lepsze łączenie danych z różnych źródeł (np. enkodery + kamera).
- Adaptacja mechaniczna: Konieczna może być zmiana konstrukcji zawieszenia lub napędu, aby poprawić trakcję i stabilność robota w trudnym terenie.
- System awaryjnego zatrzymania i autodiagnostyka: Warto dodać funkcje zabezpieczające, które pozwolą robotowi na automatyczne zatrzymanie się w przypadku utraty orientacji lub detekcji przeszkody nie do ominięcia.
Wnioski
Pomimo wielu trudności, projekt robota autonomicznego pozwolił zdobyć cenne doświadczenia z zakresu robotyki mobilnej i rolnictwa precyzyjnego. Robot osiągnął podstawowy poziom funkcjonalności, jednak wymaga jeszcze wielu usprawnień w zakresie systemu wizyjnego, konstrukcji mechanicznej i niezawodności działania.
ŹRÓDŁA
[1] Simon Monk Elektronika z wykorzystaniem Arduino i Raspberry Pi
[2] Jose Antonio Rey, Philip Ballew – ubuntu Oficjalny podręcznik.
[3] Danny Staple ; przekład: Anna Mizerska. Jak zaprogramować robota : zastosowanie Raspberry Pi i Pythona w tworzeniu autonomicznych robotów
[4] omputerowe rozpoznawanie obrazu w C++ przy użyci u biblioteki OpenCV / Adrian Kaehler, Gary Bradski ;
[5] https://husarion.com/tutorials/ros-tutorials/ – programowanie w Ros-ie